Mikroskopie atomárních sil
Mikroskopie atomárních sil (AFM - Atomic force microscopy) je bezesporu nejrozšířenější technikou z rodiny
mikroskopů s rastrující sondou (SPM - Scanning Probe
Microscopy). Metoda je založena na snímání polohy malé sondy, která je zpětnovazební smyčkou
udržována v těsné blízkosti povrchu a která se pohybuje v pravidelném
rastru po povrchu. Mechanismy detekce vzdálenosti sondy od zkoumaného
povrchu se u různých SPM technik liší; v případě AFM se jedná o detekci
síly působící mehi sondou (hrotem) a povrchem. Pro pohyb sondy nad povrchem
se typicky využívají piezokeramické aktuátory, které jsou schopny poskytnout
sub-nanometrové rozlišení.
|
Nejčastější metoda
detekce síly mezi hrotem a povrchem je využití deformace pružného držáku hrotu - cantileveru -
a detekce této deformace pomocí laserového svazku a kvadrantní fotodiody (princip optické páky).
Pro citlivost metody je přitom podstatné, aby tuhost cantileveru byla co nejmenší, což v praxi
znamená něco mezi 0,1 a 100 N/m.
Pokud bychom si vynesli závislost síly mezi hrotem a povrchem na jejich
vzájemné vzdálenosti, mohli bychom si povšimnout přitažlivých sil (ve větších
vzdálenostech, jsou to například elektrostatické, nebo van der Waalsovy síly)
a odpudivých sil (v menších vzdálenostech, díky překryvu elektronových oblaků).
Při měření pomocí AFM rozeznáváme několik základní módů rastrování povrchu, v závislosti na tom,
jestli se systém hrot - povrch nalézá na odpudivé, nebo přitažlivé části silové závislosti:
| 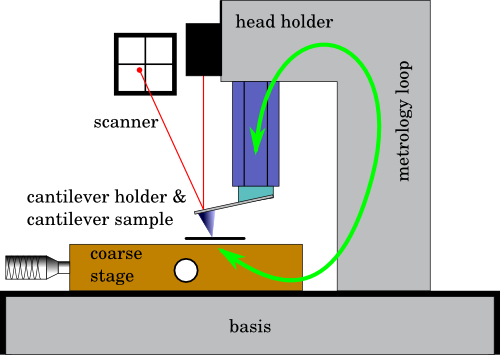 |
| Schema komerčního AFM |
- Výchylka cantileveru je udržována na konstantní hodnotě, systém hrot - povrch
se udržuje v oblasti odpudivých sil. Tomuto typu řízení říkáme kontaktní režim.
- Hrot osciluje v z-ové ose na své rezonanční
frekvenci (resp. na rezonanční frekvenci systému cantilever - hrot). Přitažlivá
síla, kterou na něj působí povrch, způsobí posun rezonanční frekvence směrem
k nižším hodnotám. Zpětná vazba udržuje hrot v takové vzdálenosti, aby byly
posun rezonanční frekvence nebo změna amplitudy konstantní. Tomuto typu řízení
říkáme většinou bezkontaktní režim.
- Hrot osciluje stejně jako v předchozím případě, avšak dostává se až do oblasti
odpudivých sil. Tomuto typu řízení říkáme poklepový režim (tapping mode).
Při měření se hrot typicky pohybuje v pravidelném rastru, tedy
snaží se získat matici reprezentující lokální výšky povrchu, a tím zmapovat topografii
vzorku. Získaná data musíme dále zpracovat a analyzovat, abychom odečetli parametry povrchu,
které nás zajímají; kromě nástrojů, které máme obyčejně k dispozici přímo u mikroskopu,
to můžeme udělat například volně dostupným programem Gwyddion [1].
Kromě měření tvaru povrchu je možné provádět i složitější experimenty.
Jedním z nich je měření lokální mechanické odezvy pomocí závislosti síla - vzdálenost,
což je metoda, kterou v principu můžeme změřit tvrdost materiálu či adhezi mezi hrotem
a povrchem. Takové měření můžeme teoreticky provést v každém bodě a můžeme tak zmapovat
mechanické vlastnosti vzorku s velmi vysokým rozlišením.
Kvantitativní měření
Kalibrace délkových měření pomocí mikroskopu je poměrně snadná, můžeme využít
například referenčních vzorků, jak je popsáno v obecné sekci o měření morfologie v nanometrologii.
Hlavním charakteristickým artefaktem, na který musíme dávat pozor při zpracování dat, je konvoluce
hrotu s povrchem, která ovlivňuje nejen měření rozměrů, ale také vyhodnocované statistické
veličiny, jako je drsnost [2] nebo fraktální vlastnosti [3].
Pokud se rozhodneme využít informaci o síle působící mezi hrotem
a povrchem, musíme provést kalibraci konstanty tuhosti cantileveru. K tomu můžeme využít
několik přístupů:
- Využití tvaru cantileveru za předpokladu, že známe mechanické vlastnosti materiálu, ze kterého je vyroben
a jsme schopni přesně změřit rozměry. I tak se nejistota v určení tuhosti pohybuje v desítkách procent,
návaznost je velmi problematická.
- Využití termálního šumu cantileveru, srovnání s jiným cantileverem, analýza přidáním známé hmotnosti
a další z nepřímých měření známých z literatury. Nejistota se pohybuje okolo pěti procent, návaznost je možné realizovat
alespoň u některých z metod.
- Využití nanoindentoru jako generátoru síly a senzoru posunutí. Nejistota se pohybuje okolo deseti procent,
návaznost je dosažena velmi lehce.
Při využití některé ze složitějších metod měření (například lokální mechanické analýzy
pomocí modulace síly), je vždy nezbytné uvažovat, jakým způsobem jsme schopni stanovit rozpočet nejistoty
a posoudit vliv různých artefaktů na výsledky.
[1] D. Nečas, P. Klapetek, Gwyddion: an open-source software for SPM data analysis, Central European Journal of Physics, 10 (2012) 181-188
[2] Petr Klapetek, Ivan Ohlídal: Theoretical analysis of the atomic force microscopy characterization of columnar thin films, Ultramicroscopy, 94, (19-29), Amsterdam, 2003
[3] Petr Klapetek, Ivan Ohlídal, Jindřich Bílek, Atomic force microscope tip influence on the fractal and multi-fractal analyses of the properties
of randomly rough surfaces Nanoscale Calibration Standards and Methods, ed. by G. Wilkening and L Koenders, Wiley VCH, p. 452, 2005
|

